The field of robotics has seen significant advancements over the past seven decades, yet it has primarily relied on motor-driven systems developed over two centuries ago. These traditional machines, prevalent in various applications including manufacturing and logistics, each share a common feature: electric motors serve as their main power sources. Motorized robots—including those designed to walk—utilize motors to simulate the movement of organic limbs, which limits their agility and adaptability compared to biological organisms. Recent breakthroughs at institutions like ETH Zurich and the Max Planck Institute for Intelligent Systems (MPI-IS) have introduced a new paradigm in robotic design, focusing on muscle-powered mechanisms that promise enhanced performance and energy efficiency.
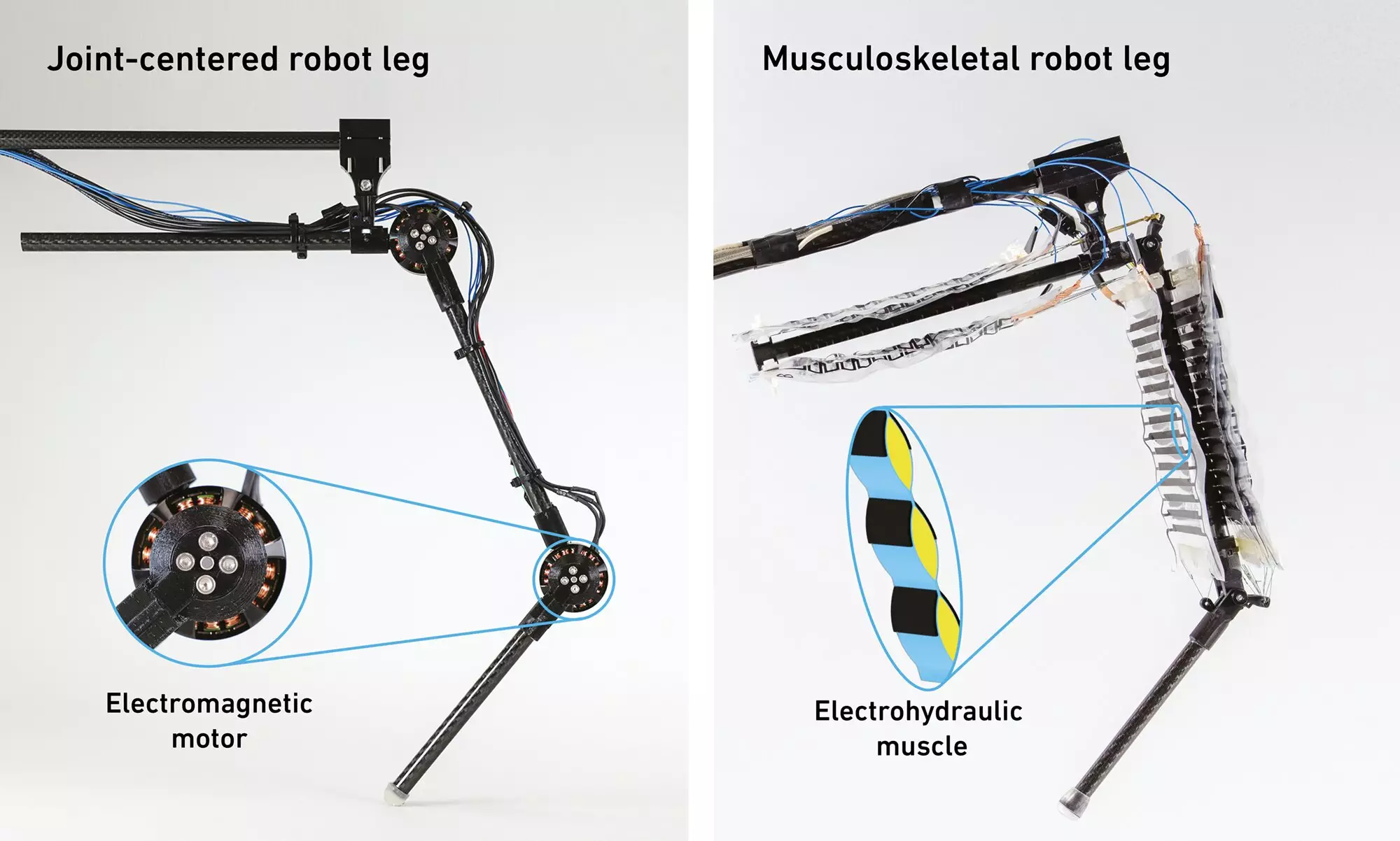
The crux of this innovation lies in a new type of robotic leg that mimics the mechanics of biological muscles. Unlike conventional robotic legs powered by electric motors, this prototype, developed by researchers David Katzschmann and Christoph Keplinger, employs electro-hydraulic actuators known as HASELs—Hydraulic Amplifier with Electrostatic-Layered Structure. These actuators function similarly to human muscles, making the robotic legs more capable of executing high jumps, rapid movements, and even better obstacle negotiation without relying on the complex sensor technologies that traditional robots utilize.
The HASELs are essentially oil-filled nylon bags equipped with electrodes on either side. Upon applying an electric voltage, these electrodes draw close to each other, compressing the bag and allowing for varied motion. This design emulates the functioning of extensor and flexor muscles found in organic beings, providing the robotic leg with the ability to move forward and backward in a way that reflects natural locomotion.
Efficiency is a critical issue in robotics, as traditional motorized designs often waste significant energy through heat dissipation, especially when maintaining static positions. This energy loss, observable in infrared imaging, has led to the need for bulky heat management solutions, such as additional cooling systems or heat sinks. However, the novel system developed by the CLS team indicates a drastic reduction in energy waste. Because HASELs operate through electrostatic mechanisms—similar to the way a balloon can attract hair when charged with static electricity—they can maintain their position without continual energy expenditure, which is a flaw in motor-driven designs.
In direct comparisons, the muscle-powered robotic leg maintains constant temperature levels, suggesting that it can remain operational for longer durations without ancillary cooling measures. This pivotal change in energy management could have far-reaching implications for robotic design, potentially leading to more efficient systems that require less electrical power.
A standout feature of this muscle-powered robot is its inherent adaptability to varied terrains. Unlike conventional robotic systems that often depend on continuous sensor feedback to adjust movements—effectively taking into account variables like the angle of joints—the new robotic leg requires only two basic input signals to operate: one to flex the joint and the other to extend it. The HASELs’ configuration allows the leg to flexibly respond to different surfaces, providing an agility that is reminiscent of human and animal movements.
As Thomas Buchner, one of the researchers, points out, this is akin to human reflexes when we arrive on an uneven surface; there is no premeditated calculation that dictates whether we should extend or flex upon landing—it occurs instinctively. This breakthrough could revolutionize how robots navigate their environments, promising smoother and more natural movements in future applications.
Despite these promising developments, it is essential to consider the limitations present in the current muscle-powered robotic leg design. While the innovation signifies a leap forward, it also exhibits constraints such as being tethered to a central rod, preventing full autonomous movement akin to bipedal organisms. Katzschmann acknowledges that extensive work is still needed to fully realize the objectives of developing robots capable of independent navigation and complex tasks, which speak to the ongoing challenges in robotic engineering.
Moreover, while muscle-powered actuators might not find their way into heavy machinery, their advantages are particularly applicable in specialized contexts—such as grippers where adaptability is critical to handling various objects. The principles underpinning this research signify a move towards a future where robotics not only imitates but also innovates based on biological principles, possibly leading to a new generation of robots that are less machine-like and more lifelike.
As researchers continue to explore the vast potential of muscle-inspired robotics, the implications of their findings could define the next era of robotic innovation, fundamentally altering our interaction with machines. The pursuit of knowledge in this field promises more flexible and efficient systems, one that might forever change the lives of those who depend on robotic assistance.
Leave a Reply