In the field of robotics, imitation learning has proven to be a valuable method for teaching robots how to perform a variety of tasks. One of the main challenges with this method, however, is the need for detailed human demonstrations to train robotic systems effectively. Teleoperation systems have been used as a way to collect these demonstrations, allowing humans to control robotic manipulators to complete specific tasks. Despite the potential of teleoperation systems, existing frameworks often struggle to accurately reproduce the complex and coordinated movements performed by humans.
Researchers at the University of California, San Diego recently introduced Bunny-VisionPro, a revolutionary teleoperation system designed to enable the teleoperation of robotic systems for bimanual dexterous manipulation tasks. The system, outlined in a paper published on the arXiv preprint server, aims to simplify the collection of human demonstrations for imitation learning. Xiaolong Wang, co-author of the paper, highlighted the inspiration behind the project, stating that existing vision-based teleoperation systems often overlook the importance of dual-hand control for complex tasks requiring hand coordination.
The primary goal of the Bunny-VisionPro system is to provide a generalized teleoperation solution that can be easily adapted to various types of robots and tasks. This approach streamlines the process of collecting demonstrations to train robotics control algorithms. Unlike conventional systems, Bunny-VisionPro offers an intuitive and immersive user experience that resembles playing a game in virtual reality (VR). Wang explained that the system allows human operators to control dual robot arms and multi-fingered hands in real-time, enhancing the quality of demonstration data for imitation learning.
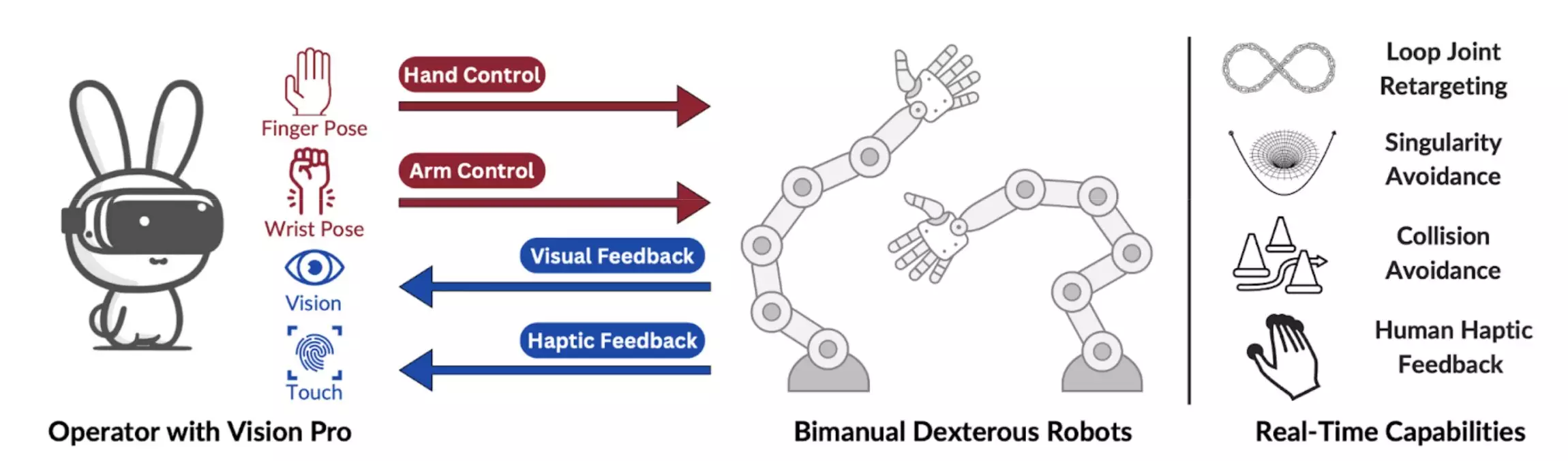
Bunny-VisionPro consists of three key modules: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. The arm motion control module is responsible for mapping human wrist poses to the robot’s end-effector poses, overcoming singularity and collision issues. The hand and motion retargeting module translates human hand poses to robot hand poses, including support for loop-joint structures. Additionally, the haptic feedback module enhances the user experience by providing tactile sensing feedback to the operator.
One of the standout features of Bunny-VisionPro is its ability to facilitate the safe control of bimanual robotic systems in real-time. By incorporating haptics and visual feedback, the system enhances the immersive experience for users while improving teleoperation success rates. Wang emphasized that the system effectively balances safety and performance, enabling seamless control of robot arms and multi-fingered hands with minimal delay. This capability is crucial for real-world robotic applications that demand reliability and precision.
The introduction of Bunny-VisionPro is poised to revolutionize the use of teleoperation for collecting demonstrations in robotics labs worldwide. This innovative system could inspire the development of similar immersive teleoperation systems and pave the way for enhanced manipulation capabilities in the future. Wang and his colleagues are eager to explore how leveraging robot tactile information can further improve precision and adaptability in robotic tasks. The impact of Bunny-VisionPro extends beyond its immediate applications, offering a glimpse into the exciting future of imitation learning in robotics.
Leave a Reply