The elephant trunk emerges as a magnificent biological marvel, deftly combining functionality and dexterity in ways that baffle the best of robotic engineers. Composed of an intricate array of 17 muscles operating in concert—ranging from those facilitating breathing, smelling, and even trumpeting, to more complex actions like grasping food and stirring water—the trunk epitomizes versatility. Alec Goriely, a noted researcher from Oxford University, underscored its significance, emphasizing its role as a living model of control dynamics in three-dimensional space.
It’s no minor feat for a single appendage to execute such an extensive range of tasks. From grooming fellow elephants to utilizing its trunk as a weapon, the adaptability of the elephant’s trunk makes it an object of fascination across multiple disciplines, especially in bioengineering and robotics. As researchers continue to study the mechanical behaviors of this appendage, insights gleaned promise exciting applications in the design and functionality of robotic systems, potentially redefining how machines can interact with their environments.
A Scientific Leap: Simplifying Complexity
In a groundbreaking study published in *Physical Review Letters*, a multidisciplinary research team endeavored to replicate the astounding capabilities of an elephant’s trunk with minimal components. Their model, ingeniously designed using only three “muscles” or actuators, indicates the potential for simplified robotic applications without sacrificing complexity in movement dynamics. Effectively capturing the essence of how the trunk operates, this minimalist approach presents a viable pathway for future robotic designs, aiming to combine powerful functionality with efficient engineering.
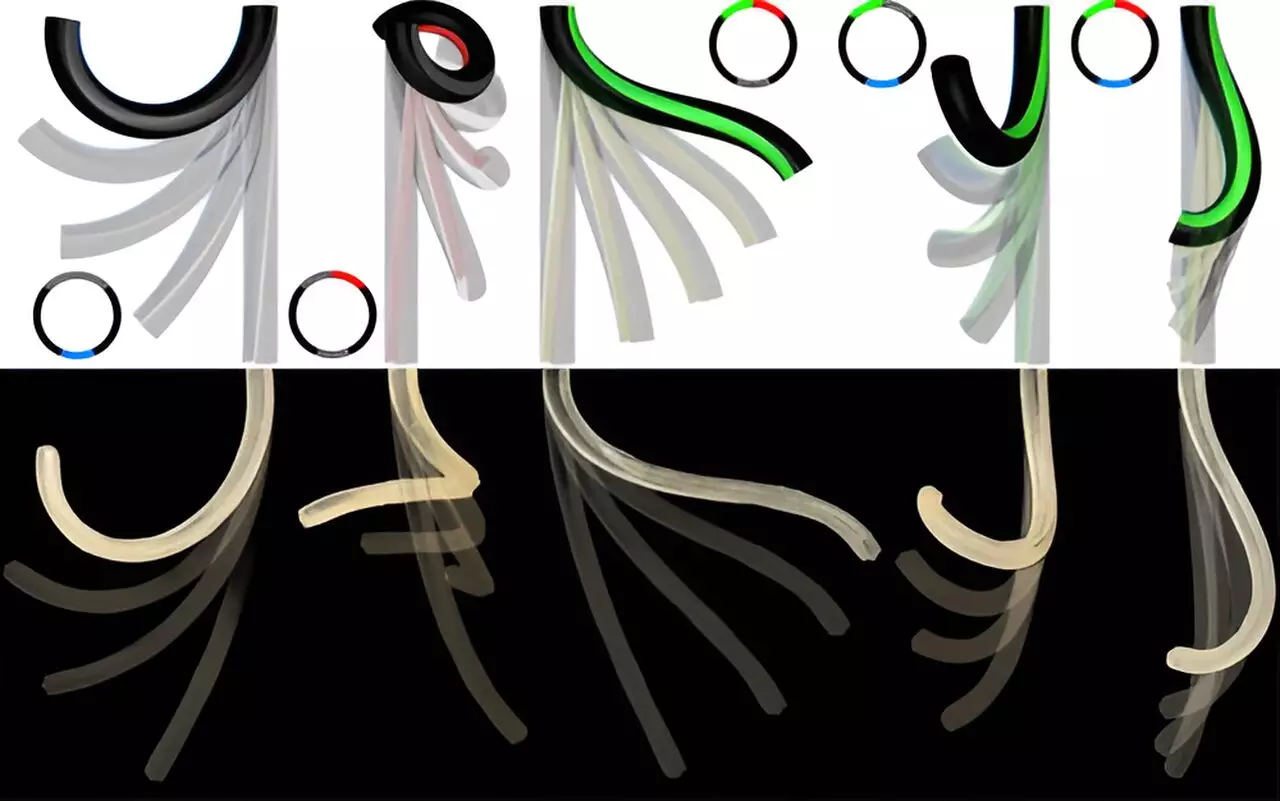
The research team, composed of engineers and mathematicians from leading universities in California and the UK, approached their task by first conceptualizing a mathematical model that portrayed the trunk as a flexible filament. By employing a combination of longitudinal and helical motions, the actuators engaged in multiple modes of play. This striking simplification offers new perspectives on common engineering challenges, suggesting that reduced complexity in robotic systems could lead to high-performing, robust machines.
Insightful Engineering: From Theory to Creation
This transformation from theory to physical model brought forth a remarkable prototype made of soft, polymer-based materials. Utilizing state-of-the-art 3D printing techniques, the researchers created fibers engineered to contract in response to heat—a mechanism reminiscent of biological muscle contraction. Each actuator was constructed to function independently, allowing for a nuanced range of movements that mirror the elephant trunk’s real-life, multifaceted actions.
Notably, the model’s performance was evaluated through its “reachability cloud,” a concept describing the spatial range within which the model could maneuver. The findings highlighted that utilizing only three well-placed actuators provides a significantly larger movement radius compared to more conventional designs. By conducting mathematical simulations, the researchers established that their minimal structure produced a reachability domain capable of navigating toward diverse target points in all directions—showcasing the model’s superior adaptability.
Implications for Robotics and Beyond
The broader implications of this research extend far beyond merely constructing a robotic trunk. The insights gained lend themselves to myriad applications in robotics, opening doors to innovation in various industries. For instance, enhanced motor skills resulting from this design could be invaluable in developing robots for manufacturing and production lines, where precise movement is a must. Moreover, insights into the biology of the elephant trunk could inspire designs in fields such as prosthetics and assistive technology—areas where mimicking natural motion holds tremendous promise.
However, despite the advancements demonstrated by their model, the researchers acknowledged limitations, such as the inability to elongate or shorten the trunk-like structure. Further research will be necessary to understand its load-handling capabilities across different contexts. This acknowledgment reflects a commitment to refining their work and signals a willingness to iterate based on observed performance, a crucial component of any scientific endeavor.
The pursuit of robotic systems informed by biological designs like the elephant’s trunk reiterates nature’s ingenuity. By examining the mechanics of this extraordinary biological structure, researchers enable us to reinvent the ways we think about robotics and machine design. Such cross-pollination between the realms of biology and engineering acts as a catalyst, fueling future innovations that promise to blend nature’s multifaceted functionalities with cutting-edge technology.
Leave a Reply