The field of soft robotics is rapidly evolving, utilizing innovative approaches to create devices that can mimic the flexibility of biological organisms. Fabric-based soft pneumatic actuators (FSPAs) are at the forefront of this development, presenting a paradigm shift in how robotic mechanisms can interact with their environments. Unlike conventional rigid robots, FSPAs can deform and adapt when subjected to pressure, enabling them to interact safely and efficiently with humans and delicate objects. Applications for these soft actuators are diverse, spanning from wearable technology to assistive devices and adaptive shelters.
Essentially, FSPAs function through inflation and deflation, which allows for dynamic movements such as bending, twisting, and stretching. Their lightweight construction combined with inherent flexibility makes them optimal for use in scenarios where traditional mechanical systems may pose risks, such as in healthcare, personal robotics, and environmental adaptability. Despite their promise, creating effective FSPAs remains a complex challenge, primarily due to difficulties in material selection and design.
Recent research has unveiled methods to overcome these challenges by integrating Turing patterns into the design framework of FSPAs. A pioneering study, published in *Scientific Reports*, highlighted how principles from Alan Turing’s morphogenesis theory can be harnessed to facilitate the design of these soft actuators. According to the researchers—Dr. Masato Tanaka and Dr. Tsuyoshi Nomura of Toyota Central R&D Labs in Japan, alongside Dr. Yuyang Song from Toyota Motor Engineering & Manufacturing North America—the motivation for this research lies in the pressing need for pneumatic actuators that can achieve controlled movements using simple, cost-effective mechanisms.
Turing patterns arise from mathematical models that describe interaction and diffusion processes, leading to spontaneous pattern formation. By applying these principles, the team aimed to design surface textures that would enable superior morphing capabilities in their fabric-based devices. Essentially, this approach allows for controlled deformation of materials, aiding in the creation of FSPAs that can achieve more complex motions with lower costs and fewer resources.
The design and fabrication of effective FSPAs have typically involved a tedious process of trial and error as researchers sought suitable isotropic materials. These materials, while uniform, can lead to unpredictable results when subjected to pressure under various conditions. The challenge lies in the need for materials that can deform in a predictable manner, which requires careful planning and ingenuity.
The research team’s strategy has pivoted towards automating the fabrication process while simultaneously optimizing material configurations to enhance performance. Utilizing a gradient-based orientation optimization method allowed them to design anisotropic materials that vary in strength and stiffness across different sections of the actuator. This transformation elevates the performance of traditional designs and opens up new avenues for creating more complex movements.
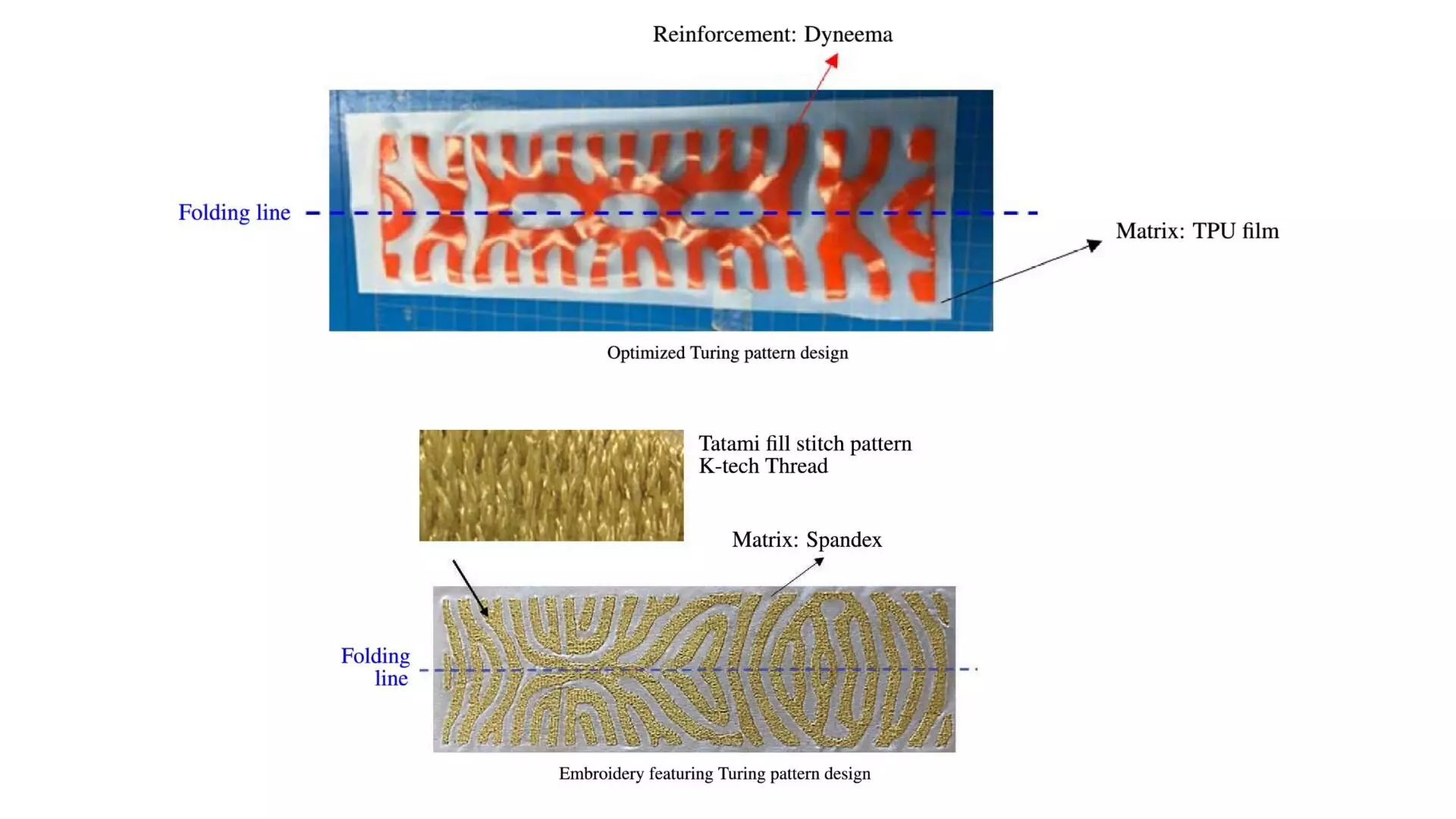
To manufacture their innovative FSPAs, the researchers investigated two distinct techniques: heat bonding and embroidery. In heat bonding, a rigid fabric is crafted into the desired Turing pattern through laser cutting and then fused with a softer material, enabling diverse mechanical properties. Alternatively, the embroidery method weaves the Turing patterns directly into softer fabrics, creating varying stiffness that allows for controlled movements.
Both fabrication methods not only demonstrate the scalability and cost-effectiveness of the actuator production but also highlight the versatility of applying Turing patterns in real-world scenarios. Comparison studies between traditional designs and the newly developed Turing pattern actuators showcased enhanced performance, particularly in achieving intricate motions with greater efficiency.
The implications of this research extend far beyond basic actuator functionalities. The researchers predict that future investigations could integrate Turing pattern designs with advanced materials, such as shape memory polymers or electroactive polymers, facilitating even more dynamic and responsive actuation mechanisms.
Moreover, expanding the range of fabrication techniques to include methods like 3D printing could revolutionize scalable production while enhancing precision. By embracing automation and sophisticated design principles, the future of FSPAs could lead to widespread advancements in soft robotics, making these technologies not only viable but essential components in a variety of applications.
The fusion of Turing patterns with the design of fabric-based soft pneumatic actuators signifies a notable leap forward in soft robotics. As researchers continue to refine their approaches, the potential impact of these innovations on technology and human interaction serves as a testament to the evolving landscape of robotics and material science.
Leave a Reply