At first glance, the act of retrieving a book from a shelf appears deceptively simple; however, the intricacies behind this movement highlight a significant challenge in the field of robotics. Unlike humans, who naturally adapt their motions in response to their environments, robotic systems struggle with the dynamic task of navigating around obstacles. This motion planning dilemma is fundamental in advancing robotic capabilities, especially as more researchers shift their focus to developing systems that can operate seamlessly in everyday environments filled with unpredictable variables.
In robotics, motion planning refers to the process by which a robot determines a viable path to move an object from one location to another without colliding with surrounding objects. Traditional motion planning techniques often require extensive computational resources and time, as they perform numerous collision checks to ensure safe navigation. This slow and methodical approach restricts robots from reacting swiftly to unforeseen changes in their environment, leaving them ill-equipped to tackle real-world scenarios.
Addressing these limitations, a pioneering team at Carnegie Mellon University’s Robotics Institute has introduced a novel framework known as Neural Motion Planning. This innovative approach leverages artificial intelligence to enhance the adaptability and efficiency of robots when confronted with new and unstructured surroundings. Murtaza Dalal, a key contributor to this research, emphasizes that when robots are deployed in environments where they cannot predict every detail, traditional motion planning methods often falter.
Neural Motion Planning draws inspiration from human learning. Just as humans perfect their movements over time through a blend of experience and practice, robots can now evolve their performance through simulated training. This process allows robots to start with cautious and tentative movements before gradually mastering the agility required for more complex tasks. As a result, robots can exhibit improved versatility, adapting to unforeseen obstacles while carrying out their functions.
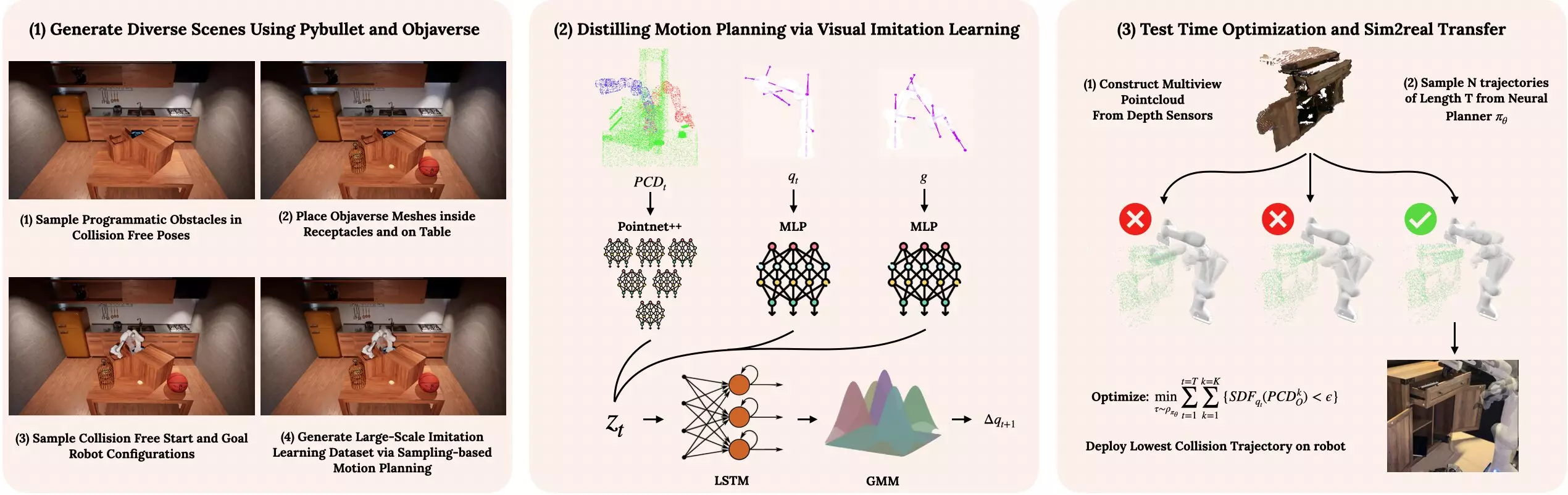
The development of Neural Motion Planning involved extensive simulations where robots were repeatedly exposed to diverse household environments, ranging from simple kitchen spaces to complex living rooms. These scenarios included various obstacles—everything from furniture to playful pets—complicating the robots’ task of object manipulation. Researchers modeled millions of situations to cultivate a robust data set that would enable the Neural Motion Planning network to learn effectively.
By synthesizing this vast array of experiences into a generalist policy, the robots could generalize their skills and apply them to novel real-world tasks even if the specific environment had not been seen during training. This fundamental shift allows robots to exhibit a level of adaptability comparable to human behavior—a significant milestone in robotic intelligence.
Real-World Applications and Future Prospects
The practical implications of Neural Motion Planning are profound. In laboratory tests, robotic arms utilizing this framework exhibited remarkable success navigating unfamiliar household challenges. By integrating depth sensors to generate three-dimensional representations of their surroundings, the robotic systems could determine optimal paths to desired endpoints—effectively mimicking the fluid motion of human gestures.
Deepak Pathak, an influential figure in this research, points out that while advancements in large-scale learning for artificial intelligence applications in vision and language have surged—exemplified by technologies like ChatGPT—the field of robotics has yet to reach a similar level of innovation. Neural Motion Planning represents a significant advancement in robotics, creating pathways towards smoother interaction between humans and machines in daily life scenarios.
As technology progresses, we stand on the brink of an exciting era where robots can navigate and perform tasks in unpredictable environments. While there is still work to be done, the advent of methodologies like Neural Motion Planning signals a promising future for the integration of robotics into our everyday experiences, enhancing not just industrial applications but also personal assistance and household robotics. If this trajectory continues, we may soon find ourselves in a world where robotic companions seamlessly blend into our daily routines, enriching our lives and augmenting our capabilities.
Leave a Reply