Robots are increasingly being utilized to assist humans in various daily tasks across different settings. One of the key requirements for robots to effectively manipulate objects is the development of cost-effective robotic grippers or hand-like artificial systems. Recently, researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) introduced a new two-finger robotic gripper designed to improve everyday manipulation tasks.
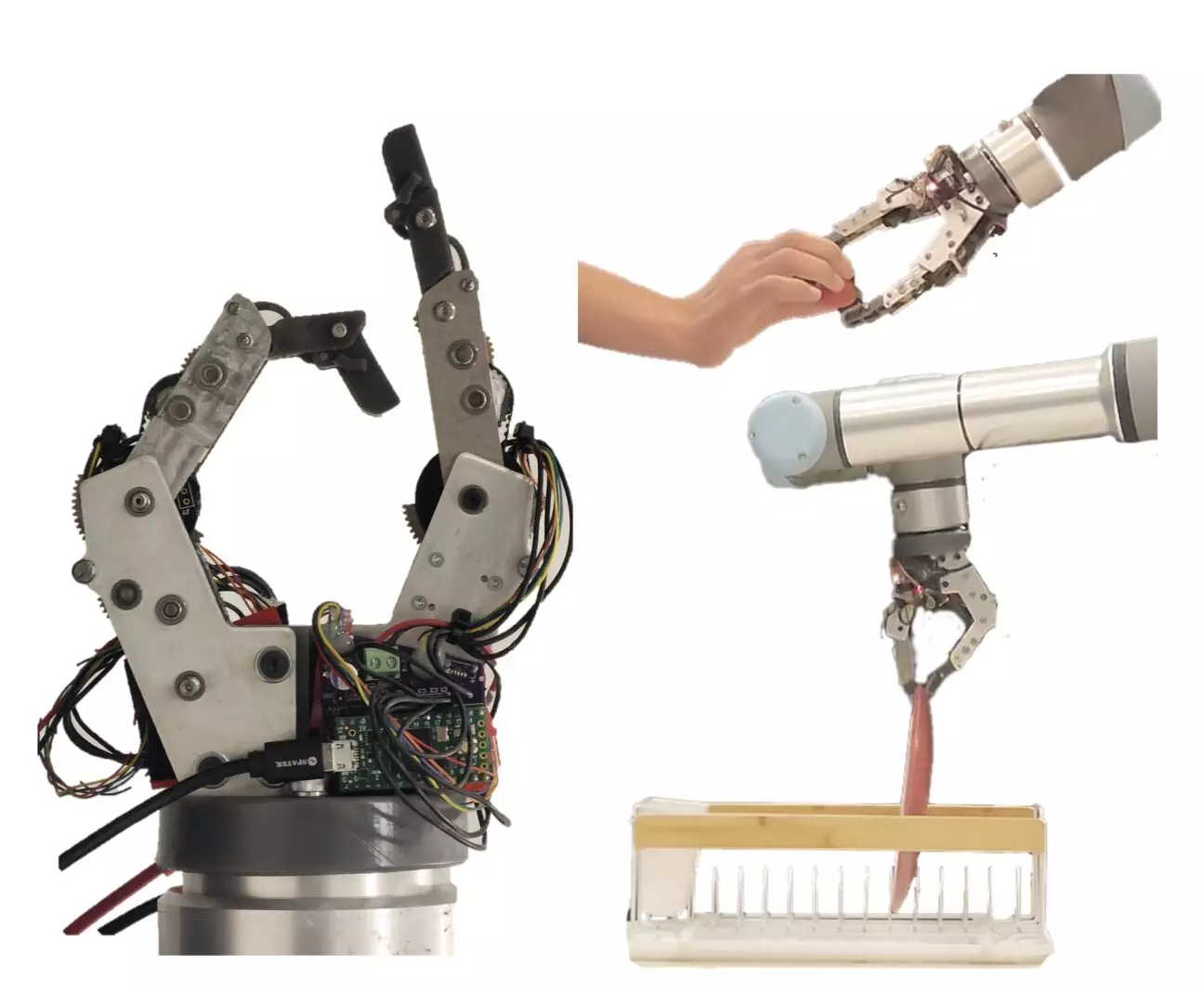
The robotic gripper created by the researchers consists of a structure with two robotic fingers that mimic human fingers in both size and shape. These fingers are designed to bend and securely grasp objects, enabling the robot to pick up items with different shapes and textures and place them in specified locations. The focus of the researchers was to make the fingers as compact as possible while ensuring optimal performance.
While the current gripper has two degrees of freedom (DoF) with only two fingers, the researchers aim to enhance the design by incorporating more fingers in future iterations. They acknowledge the challenges of fitting five fingers onto a hand, but believe that a three- or four-finger hand is feasible. The development of more torque-dense actuators in the future may enable the creation of a full five-finger hand for the robot.
To evaluate the performance of their two-finger gripper, the researchers conducted real-world experiments that assessed its speed, compliance, and the force applied to objects during basic pick-and-place tasks. The experiments included activities like placing dishes in a rack, handling thin and delicate objects such as paper and strawberries. The gripper demonstrated success in completing these tasks, indicating its potential for use in basic household robots.
The positive outcomes of the initial testing of the two-finger gripper showcase its promise for the development of robots capable of conducting simple everyday tasks. Moving forward, the researchers can further refine the gripper’s design and evaluate its performance across a wider range of daily activities. This could lead to the advancement of robotic systems that are more adept at assisting humans in various real-world scenarios.
The development of cost-effective robotic grippers, such as the two-finger gripper created by researchers at Improbable AI Lab and MIT, is crucial for enabling robots to effectively manipulate objects in everyday settings. By focusing on improving dexterity and performance, these robotic systems have the potential to revolutionize human-robot interactions and pave the way for the integration of robots into various aspects of daily life.
Leave a Reply